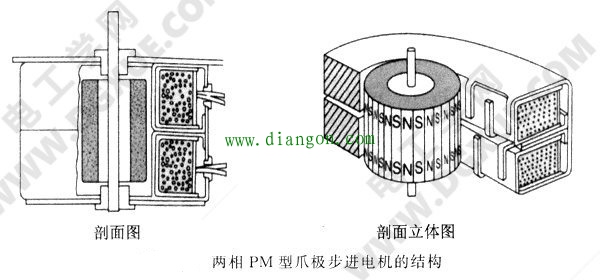
转子为圆柱形永久磁铁,其中心安装了输出轴。圆柱形永久磁铁的圆周外表面交替分布着N极和S极,极对数为Nr,N、S极等极距。其转子磁极通过气隙,对着定子磁极。定子磁极依其形状称为爪极(claw pole),由导磁钢板冲压成型,形成Nr个爪极。两个定子极板其磁极交互安放,相差1/2极距,共2Nr个与转子磁极数2Nr相对应,形成一相定子。
定子为爪极型的步进电机,气隙为0.2mm(比HB型步进电机的气隙大3~4倍)。其分辨率与相同尺寸的HB型步进电机相比相差1/4。与相同尺寸的HB型步进电机相比,其转矩只有1/3。决定步距角的分辨率由式θs=180°/PNr得知,如P=2,则θs=90°/Nr。若Nr=5~12,则步距角θs为1.8°~7. 5°,通常使用7. 5°。
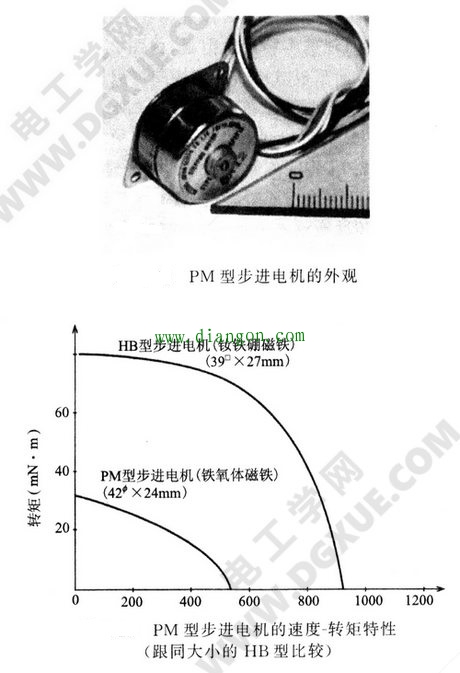
下图示为PM型步进电机的外观及PM型步进电机(42×长度27mm,步距角7.5°)的速度-转矩特性[与尺寸接近的 HB型步进电机(39×长度27mm,步距角1.8°)比较]。因为HB型为方形,其对角线为42mm以上,而且转子为永久磁铁,PM型为便宜的铁氧体磁铁,HB为钕铁硼磁铁,极对数相同,且PM型的气隙比HB型大3倍以上,故转矩差如此之大也是必然。关于最高转速和电气时间常数(线圈电感除以电阻之值)的差异,仅供参考。
此种PM型步进电机的最大特点为价格便宜。从成本角度分析如下。
PM型转子通常使用铁氧体磁铁等低成本材料,轴承使用金属滑动轴承(Sleeve metal),导磁材料使用电工钢板,从材料费方面考虑做到低成本的设计。线圈卷绕在线圈骨架上,可提高绕线效率,节省绕线时间。线圈端头采用低价接线端子。与相同尺寸大小的HB型相比,只有其价格的1/3。使用的数量为HB型的3倍以上,其使用量有逐年增加的趋势。